Asset tracking¶
Monitor¶
This section is one of the main ones on the platform, enabling the management of all drones connected.
In Fig. 48 one can see the monitor page for the UAVs connected in real-time, enabling the video stream of the attached camera, right above are the GPS coordinates and orientation (yaw) indicator. In this section we also have a small 3D UAV that mimics the angular movement of the real UAV (roll and pitch).
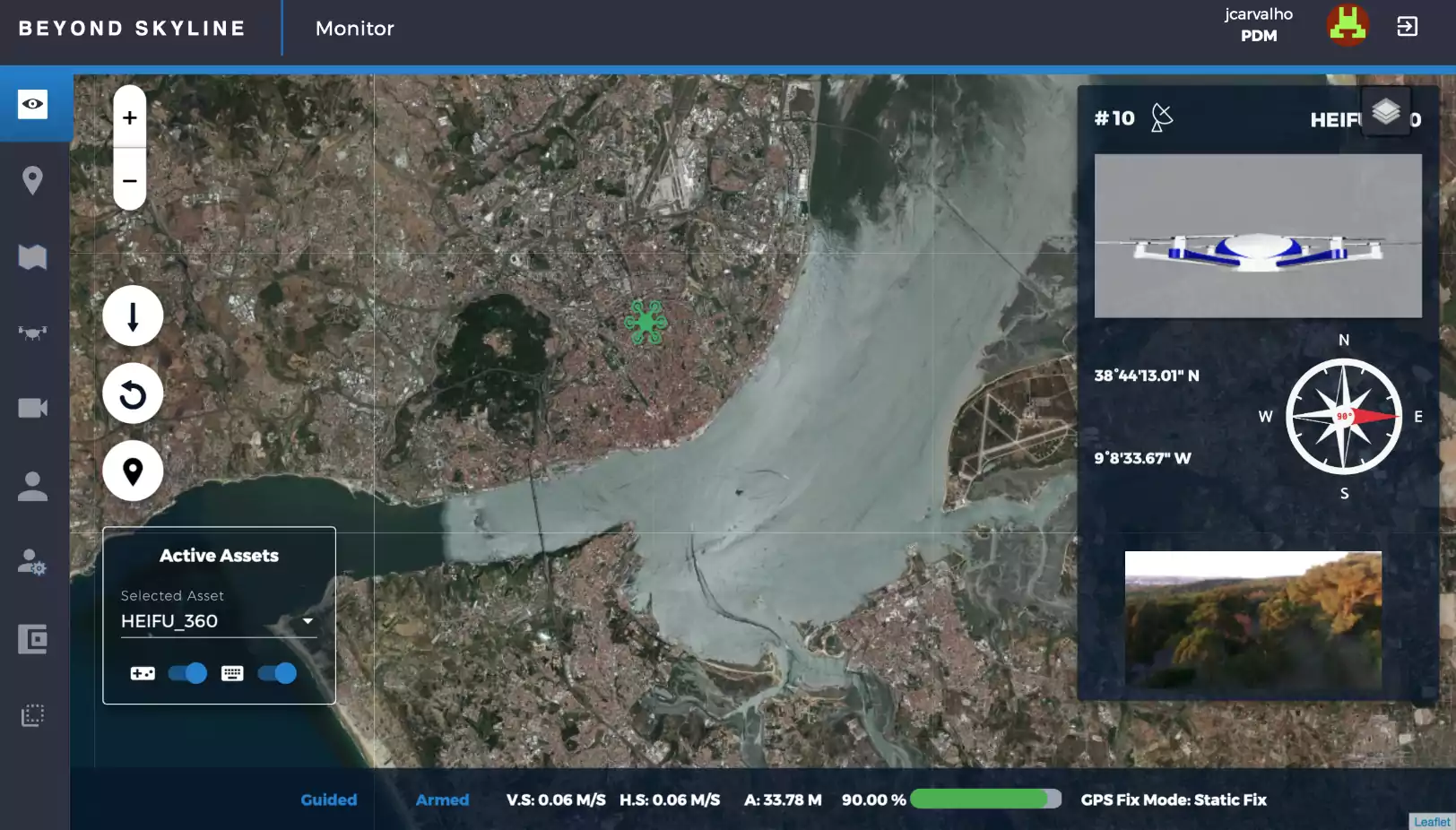
Fig. 48 UAV real-time monitor page¶
In the bottom bar, the vertical and horizontal speeds, the current altitude and the remaining battery are conveniently presented.
On the left-hand side there are 3 buttons options:
Takeoff and Land buttons;
Return to Launch (RLT), button to land where the UAV took off;
Set Position button to move the UAV to the desired position.